挻彫宆挻壒攇儌乕僞乕
奣梫
廬棃偺挻壒攇儌乕僞偲偼堎側傝僐僀儖忬偺僗僥乕僞偵奜晹偐傜怳摦傪揱偊傞偙偲偵傛偭偰丄 儘乕僞傪夞揮丄堏摦偝偣傞挻壒攇儌乕僞偺奐敪傪峴偭偰偄傑偡丅 偙偺峔憿偺挻壒攇儌乕僞偼丄 梊埑梡僶僱偲媧廂懱偑晄梫丄峔憿偺娙堈壔丄彫宆壔偑梕堈丄杊悈張棟側偟偱塼拞摦嶌丄 拞嬻墌摏偺夞揮摦嶌偑壜擻側偳偺摿挜偑偁傝傑偡丅
尨棟
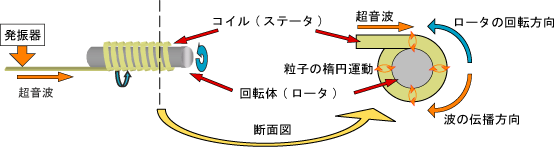
挻壒攇怳摦巕偐傜偺怳摦(孅嬋攇)偑僐僀儖(僗僥乕僞)偵揱傢傝丄
僗僥乕僞偺昞柺棻巕偑丄抐柺恾偺傛偆偵懭墌塣摦傪偟傑偡丅
棻巕偺懭墌塣摦偑杸嶤傪夘偟偰堏摦懱(儘乕僞)偵揱払偝傟丄攇偺揱攄曽岦偲媡曽岦偵堏摦懱偑夞揮偍傛傃堏摦偟傑偡丅
摿挜
|
仭 僔儞僾儖側峔憿丂佀丂掅僐僗僩 仭 挻彫宆壔偑壜擻丂佀丂冇0.5mm亊3mm 仭 壜擻側摦嶌 佀 夞揮丄捈恑亄夞揮 |
|
 夞揮宆儌乕僞偺摦嶌 |
 夞揮宆儌乕僞偺偺摦嶌(奼戝) |
婡擻巇條
| 嵟戝僩儖僋 | 冇1亊6mm偺儌乕僞偱0.1兪Nm偺僆乕僟乕 |
|---|---|
| 嵟戝夞揮悢(柍晧壸帪) | 8000rpm |
| 廃攇悢 | 300kHz乣500kHz |
| 嬱摦揹埑 | 栺40Vpp |
梡搑椺
仭 実懷僇儊儔摍偺俙俥僔僗僥儉丂佀丂掅僐僗僩
仭 堛梡墳梡丄寣娗撪挻壒攇朄丄岝妛撪帇嬀摍丂佀丂挻彫宆壔
仭 俵俤俵俽丂佀丂挻彫宆壔